L’astronauta della Nasa Frank Rubio, attualmente a bordo della Iss, ha collaborato con un team di tre robot a terra per mettere a punto una serie di test utili alle prossime missioni dirette sulla Luna.
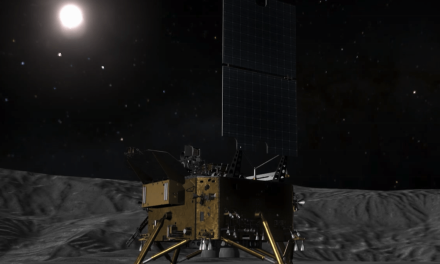
Il test di due ore, il primo della serie ‘Surface Avatar’, si è svolto presso il centro dell’Agenzia spaziale Tedesca (Dlr) di Monaco e Rubio ha condotto le operazioni dal modulo Columbia della Stazione Spaziale. L’obiettivo della prova era utilizzare il robot umanoide Justin per rimuovere un sismometro da Interact, il lander lunare dell’Esa, per poi posizionarlo sul terreno.
Questo approccio da remoto sarà utile per svolgere tutte le operazioni che non possono essere effettuate dagli astronauti sulla superficie del nostro satellite.
Rubio ha svolto tutti i compiti nell’arco temporale prestabilito e ha valutato le caratteristiche dell’interfaccia utente dei robot. Queste ultime saranno implementate il prossimo anno, nel corso della nuova sessione di Surface Avatar. L’astronauta Esa Andreas Morgensen parteciperà al programma effettuando una nuove analisi durante la missione Huginn, in partenza alla fine dell’estate.
«Il test – afferma Thomas Krueger, responsabile dello Human Robot Interaction Lab dell’Esa – ha dimostrato la fattibilità delle tecniche di controllo dall’orbita locale che abbiamo già sperimentato nel corso della simulazione Analog-1 condotta sull’Etna in Sicilia. Con Surface Avatar abbiamo combinato l’approccio di teleoperazione diretta con la supervisione umana per eseguire compiti complessi che saranno di routine per gli astronauti che si troveranno a lavorare sulla Luna».
Immagine in apertura: il robot Justin al lavoro sul lander. Crediti: Dlr