L’Esa e l’agenzia spaziale tedesca Dlr – in collaborazione con il mondo accademico e industriale – hanno sviluppato un progetto relativo al controllo dei rover da parte degli astronauti in orbita, in modo tale che questi ultimi possano svolgere operazioni sulle superfici planetarie. I risultati dello studio sono stati pubblicati su Science Robotics.
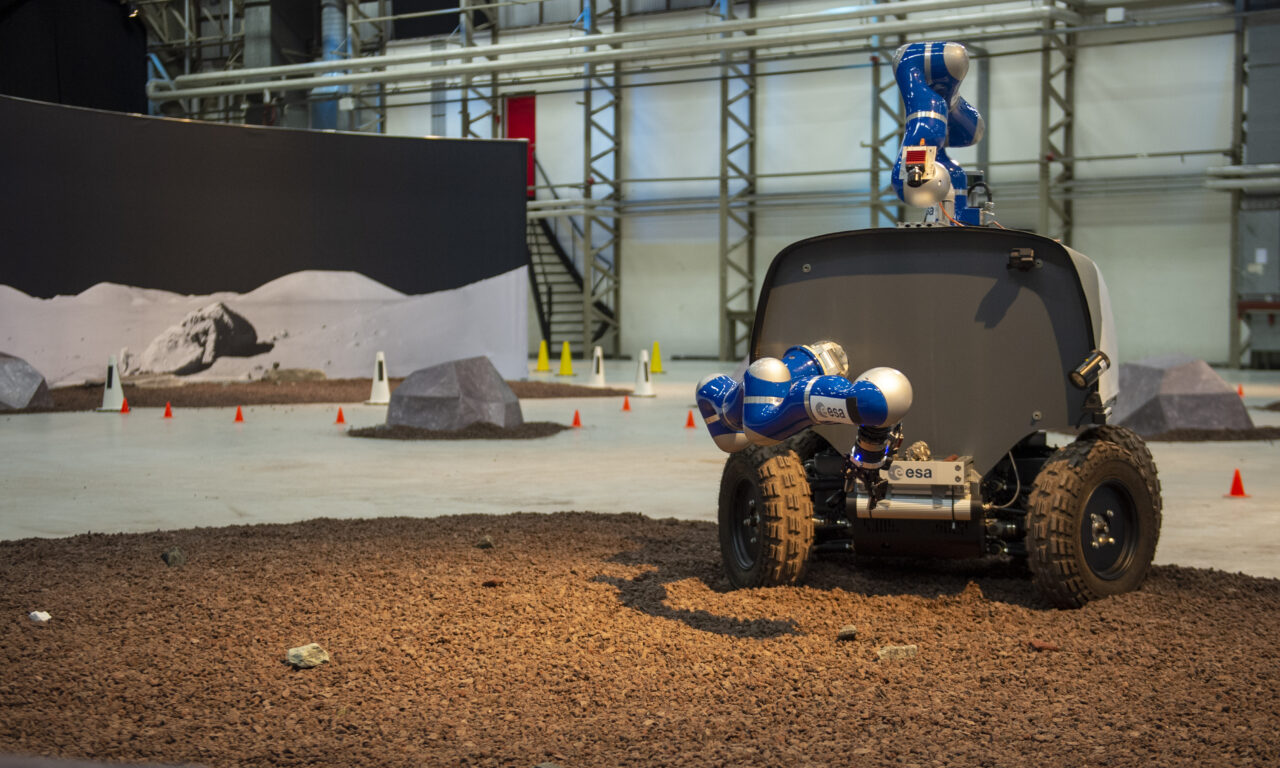
Questa tecnica è stata messa alla prova dall’astronauta dell’Esa Luca Parmitano nel 2019 nel corso della missione Beyond. Parmitano ha controllato dalla Iss i movimenti del rover Analog-1, situato presso il centro di Valkenburg, nei Pesi Bassi. Uno degli obiettivi del test era valutare l’uso dei controlli “force-feedback”, una sorta di joystick che da il senso del tatto all’utente. Lo scopo era verificare se questa tecnologia fosse in grado di consentire operazioni di alta precisione, come il campionamento di rocce in assenza di gravità. Per svolgere questo genere di compiti così delicati, infatti, è essenziale una supervisione attenta degli astronauti nel corso dell’intera operazione.
«Questa è la prima volta che un astronauta nello spazio riesce a controllare un sistema robotico a terra in un modo così coinvolgente e intuitivo – commenta Aaron Pereira della Dlr – il nostro obiettivo era ideare una tecnica che permetta agli astronauti di pilotare un rover su un altro pianeta mentre sono in orbita. Avranno la possibilità di essere abbastanza vicini alla superficie e di avere il controllo diretto per poter eseguire i comandi con estrema precisione».
Immagine: il robot Analog-1 Credit: Esa–A. Koehler