Il viaggio verso la costruzione di una base lunare richiede di superare un ostacolo fondamentale: trasformare l’in-situ resource utilization (Isru) — ovvero l’utilizzo delle risorse disponibili sul posto — in una realtà operativa.
Grazie all’Isru, la regolite, le rocce e il ghiaccio presenti sulla Luna potranno essere convertiti in ossigeno, acqua potabile, propellente e materiali da costruzione. Questo approccio ridurrebbe in modo significativo costi e rischi, diminuendo la dipendenza dai rifornimenti terrestri e aprendo la strada a infrastrutture permanenti, habitat stampati in 3D e missioni di lunga durata, fino a Marte.
Tuttavia, estrarre e trasformare risorse in ambienti ostili, con gravità ridotta, temperature estreme e polveri abrasive, pone sfide tecnologiche enormi. Bulldozer ed escavatori, che sulla Terra sfruttano il loro peso per applicare forza, sulla Luna finirebbero per spingersi via dal suolo senza estrarre nulla.
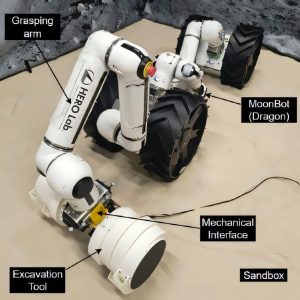
Immagine del braccio escavatore collegato al rover Dragon in una sandbox di test. Crediti: arXiv
In questo scenario, il nuovo studio condotto da un gruppo di ricercatori della Tohoku University, in collaborazione con Nasa e Jaxa, propone una soluzione ingegnosa: un robot escavatore con tamburo rotante dotato di benne. Il design presenta due vantaggi principali rispetto alle attrezzature minerarie tradizionali: estrae piccole quantità di materiale a ogni passaggio, riducendo la forza necessaria, e può operare in modo rapido e continuo, accumulando grandi volumi in tempi brevi.
Il prototipo, costruito con materiali leggeri come plastica stampata in 3D e rinforzi in fibra di carbonio, integra tre funzioni — escavazione, caricamento e trasporto — senza ricorrere a nastri trasportatori, che si guasterebbero facilmente nella polvere lunare. Nonostante il peso ridotto — appena 4,8 chilogrammi — il robot può trasportare fino a 21 chili di materiale. Nei test, il braccio autonomo ha raggiunto una capacità di scavo di 777 chilogrammi all’ora, con un consumo energetico minimo (0,022 Wattora per chilo). Montato su un rover chiamato Dragon, la produttività è salita a 839 chilogrammi all’ora, prestazioni paragonabili al Rassor (Regolith Advanced Surface Systems Operations Robot) della Nasa, finora considerato il modello di riferimento per questo tipo di escavatori.

Rassor 2.0, il Regolith Advanced Surface Systems Operations Robot della Nasa. Crediti: Nasa
L’idea di creare macchine intelligenti che possano supportare gli astronauti nelle attività più impegnative, come la raccolta di risorse e la costruzione di infrastrutture, è alla base del Moonshot Program della Jaxa, con cui l’agenzia spaziale giapponese punta a sviluppare, entro il 2050, robot capaci di operare in modo autonomo sulla Luna, senza bisogno di controlli costanti dalla Terra. Lo studio della Tohoku University descrive uno degli elementi di questo programma: un accessorio che sarà agganciato al Moonbot, una piattaforma modulare progettata per adattarsi a diversi compiti e scenari di esplorazione.
Questa tecnologia apre la strada a missioni più sostenibili e a basi lunari capaci di utilizzare le risorse locali, un obiettivo condiviso dalle principali agenzie spaziali mondiali. Non a caso, lo studio, pubblicato sul server di preprint arXiv, sarà presentato il 3 dicembre all’International Conference on Space Robotics (iSpaRo 2025), in programma a Sendai, in Giappone. Il convegno, co-sponsorizzato dall’Institute of Electrical and Electronics Engineers (Ieee), riunirà Nasa, Esa, Jaxa, università e industria per discutere le tecnologie che renderanno possibile l’esplorazione autonoma di pianeti e satelliti.
Immagine in alto: una base lunare con robot dotati di intelligenza artificiale nel 2050. (Crediti: Jaxa)






