Con il programma Artemis, la Nasa punta a stabilire una presenza permanente e sostenibile dell’uomo sulla Luna. Uno degli aspetti cruciali di questa missione riguarda lo spostamento sicuro dei carichi, i cosiddetti ‘payloads’, dai lander alla superficie lunare. Questi carichi possono includere piccoli esperimenti scientifici, o tecnologie più grandi per la costruzione di infrastrutture. Ma, in assenza di un equipaggio a svolgere l’intero lavoro, chi si occuperà di spostare i payload essenziali? Potrebbero pensarci robot e nuovi software, come Lando.
Un gruppo di ricerca del Langley Research Center della Nasa, a Hampton, Virginia, ha lavorato negli ultimi anni all’integrazione di hardware robotici già esistenti con un sistema software in grado di far funzionare autonomamente i robot. Il team, guidato da Julia Cline del Langley Research Directorate, ha messo a punto un sistema chiamato Lando (Lightweight Surface Manipulation System AutoNomy capabilities Development for surface Operations and construction), recentemente sottoposto a una serie di ‘performance’.
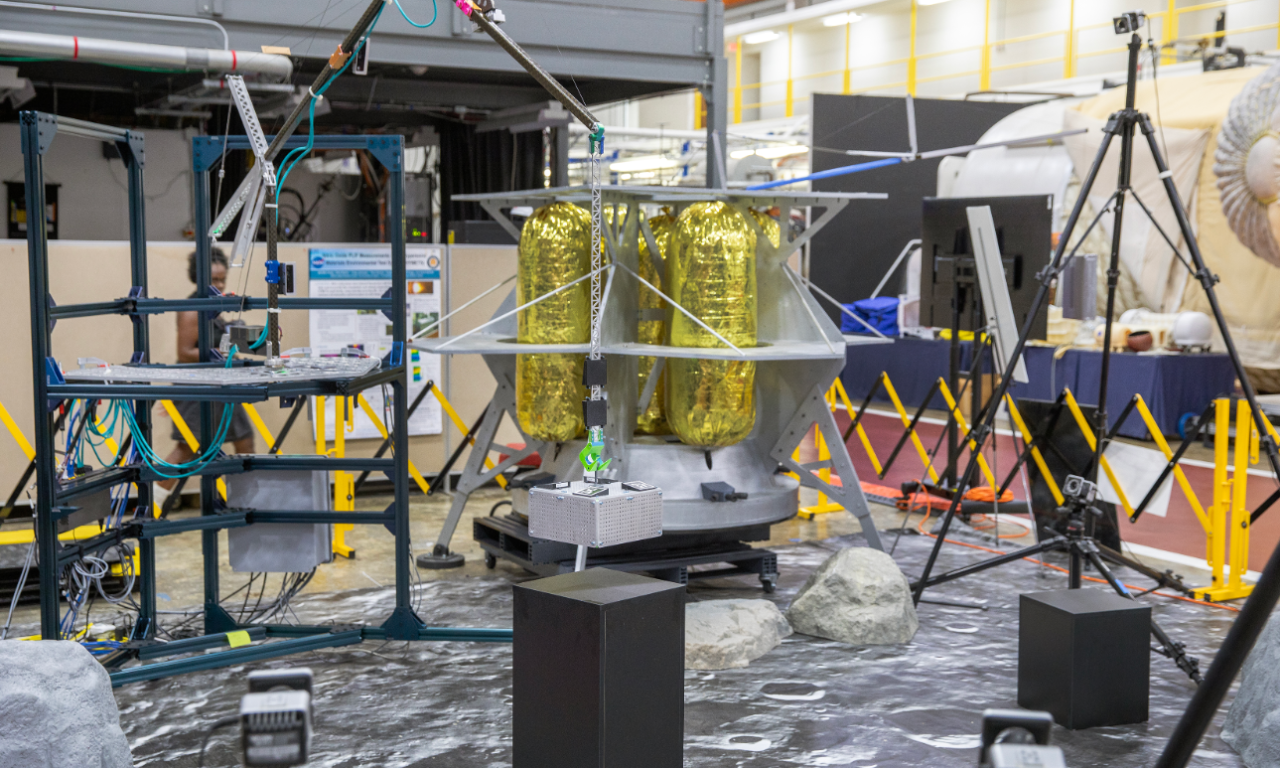
Le dimostrazioni si sono svolte in un’area allestita per somigliare alla superficie del nostro satellite, completa di rocce artificiali e un modello di lander lunare. Nella prima dimostrazione, il team ha posizionato il carico – una piccola scatola di metallo – su un piedistallo; il braccio robotico ha fatto il suo debutto mostrando un gancio pronto ad afferrare la scatola. Grazie a sensori montati sul braccio, il sistema ha scansionato l’area circostante, dotata di marcatori codificati simili a codici QR, per localizzare il carico. Selezionata una zona precisa in cui il sistema avrebbe dovuto collocare il carico, Lando ha individuato la posizione e un percorso sicuro, muovendo lentamente il braccio verso il carico, che ha agganciato con precisione. Una volta sollevato, lo ha poi spostato e adagiato sulla superficie lunare riportando il braccio, dopo aver concluso la manovra, alla posizione di partenza.
L’intera operazione ha richiesto pochi minuti ed è stata poi ripetuta con un piccolo modello di rover. Obiettivo della missione era infatti mostrare la ripetibilità del sistema – ovvero la sua capacità di spostare diversi carichi in modo costante e sicuro da un punto all’altro – e testare l’efficacia dell’hardware del Lightweight Surface Manipulation System nel pianificare percorsi complessi, aggirando gli ostacoli.
La riuscita della dimostrazione di Lando segna un passo in avanti verso la realizzazione di sistemi robotici autonomi in grado di facilitare operazioni complesse sulla superficie lunare, nonché una tappa importante nello sviluppo di un sistema più grande e articolato che verrà inviato sulla Luna.
«Il sistema di controllo generale che abbiamo sviluppato potrebbe essere applicato a versioni più grandi della tecnologia», dice Julia Cline. «Considerando i carichi che dovremo scaricare sulla Luna, come habitat e sistemi di alimentazione di superficie, questo è il tipo di strumento multiuso che potrebbe essere utilizzato per svolgere quei compiti».
In apertura: Il sistema robotico Lando si prepara a spostare il suo carico in un punto sicuro della superficie lunare simulata. Crediti: Nasa/David C. Bowman