Uno stormo di esploratori robotici che comunicano tra loro lasciando lungo il percorso ‘briciole’ come Pollicino. È l’innovativo sistema, di ispirazione fiabesca, proposto da una nuova ricerca per far connettere rover, lander e persino sommergibili durante l’esplorazione degli ambienti impervi del sistema solare, come i tunnel lavici sotterranei di Marte chiamati lava tubes o i laghi delle lune planetarie.
Le ‘briciole’ saranno i nodi di comunicazione tramite cui le macchine potranno lavorare insieme come una squadra e in modo autonomo dall’uomo.
La ricerca è pubblicata su Advances in Space Research.
Prima di poter assistere all’esplorazione umana di lunga durata sulla Luna o su Marte, i robot saranno mandati in avanscoperta negli ambienti che potranno accogliere l’uomo.
Per esempio, i lava tubes marziani rappresentano un ambiente sotterraneo protetto dalla radiazione cosmica e solare oltre che un riparo dai micrometeoriti, risultando così ideale per le future basi umane.
Prima di questa nuova era sarà, però, necessario un’evoluzione della tecnologia attuale per garantire esplorazioni robotiche sempre più complicate da realizzare tuttavia in sicurezza.
Per affrontare questa nuova sfida, ingegneri dell’Università dell’Arizona hanno ideato un’innovativa tecnologia basata su una piattaforma comunicativa robusta in cui i robot tracciano la propria strada lasciando a Terra ‘briciole’ come nella fiaba di Pollicino.
«Nel nostro scenario, le ‘briciole di pane’ sono sensori miniaturizzati che si appoggiano ai rover, che li distribuiscono mentre attraversano una grotta o un altro ambiente del sottosuolo», afferma Wolfgang Fink, primo autore dell’articolo.
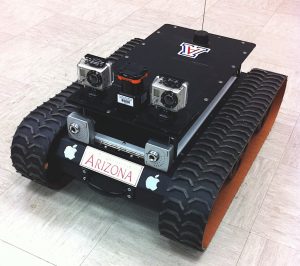
Uno dei rover sperimentali utilizzati dal team di Fink per testare hardware e software relativi all’esplorazione autonoma. Questo prototipo è dotato di telecamere e altri sensori per la navigazione. Crediti: Wolfgang Fink/Università dell’Arizona
Nell’approccio proposto, mentre si addentra in un luogo sconosciuto, ciascun robot depositerà un nodo di comunicazione nel momento in cui percepisce che il segnale si sta affievolendo, indipendentemente dalla distanza effettivamente trascorsa dall’ultimo nodo depositato; così non viene perso il collegamento con il resto della squadra.
La distribuzione di queste ‘briciole di pane’ non è dunque pianificata a priori, ma realizzata man mano si riveli la necessità.
Il paradigma con cui tutta la squadra di esploratori opera è quello della ricognizione scalabile per livelli, ideato da Fink più di venti anni fa. Questo approccio prevede un reciproco controllo messo in atto autonomamente dai robot, pur con diversi livelli di comando. Esempio di questo paradigma è l’elicottero marziano Ingenuity gestito e comandato dal rover Perseverance.
Oltre a non far perdere il contatto tra di loro, le ‘briciole di pane’ permetteranno ai robot anche di rimanere legati all’esploratore principale, o robot madre. Questo, nel paradigma proposto, può agire come un destinatario passivo, raccogliendo cioè i dati trasmessi dai rover in esplorazione, o come un burattinaio, ossia controllando i movimenti dei robot subordinati.
Il sistema permetterebbe di esplorare e mappare i luoghi più impervi, garantendo inoltre l’identificazione di passaggi e uscite da grotte o cunicoli grazie a rilevatori della luce sui robot. La condivisione delle informazioni attraverso la rete di ‘briciole’ permetterà alla squadra di addentrarsi sempre più in profondità in ambienti sconosciuti.
«Una volta dispiegati, i nostri sensori stabiliscono automaticamente una rete a maglie non dirette, il che significa che ogni nodo si aggiorna su tutti i nodi che lo circondano», conclude Fink.
La suddivisione del lavoro e l’ottimizzazione delle comunicazioni rendono persino opzionabili anche delle missioni senza ritorno per i robot subordinati, in quanto essi risultano sacrificabili per il lavoro di squadra: le briciole sparse garantiscono, infatti, al robot madre una costante connessione con il nodo più lontano della rete, non facendogli mai perdere né il segnale né le informazioni acquisite dai robot in avanscoperta.
Immagine in evidenza: rover autonomi che esplorano un tubo di lava dopo essere stati dispiegati da un rover madre che rimane all’ingresso per mantenere il contatto con un orbiter o un dirigibile. Crediti: John Fowler/Creative Commons, Mark Tarbell e Wolfgang Fink/Università dell’Arizona