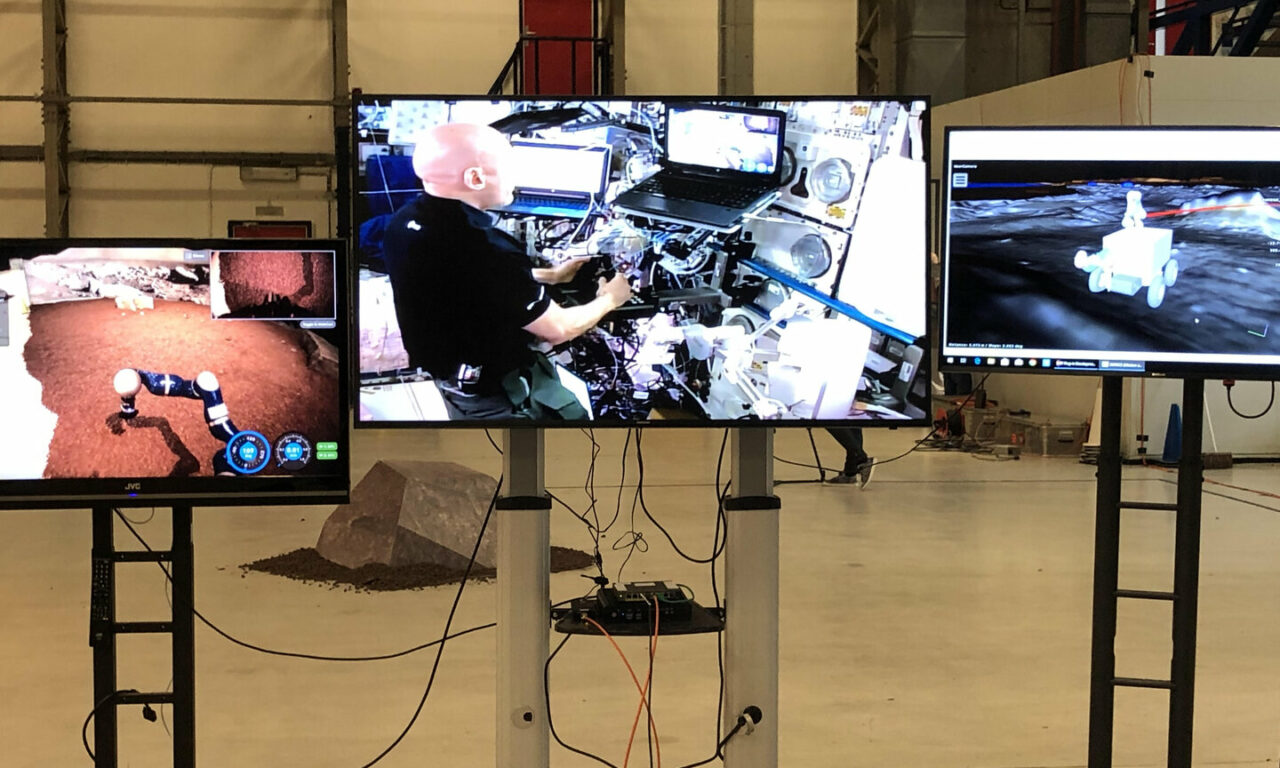
Le mani di Luca Parmitano, l’astronauta italiano dell’ESA, hanno lavorato con tale precisione e accuratezza quasi come fossero state sulla Terra. In realtà AstroLuca, a bordo della ISS dallo scorso luglio con la missione ESA Beyond, ha manovrato un rover dotato di un braccio prensile grazie a un sofisticato joystick del test ESA Analog-1, confermando che il collegamento di controllo spazio Terra dell’hardware e del software utilizzati a bordo della stazione spaziale hanno funzionato alla perfezione.
Le trasmissioni di segnale tra la ISS e l’hangar a Terra presso l’Esa Astronautic Control (EAC) registravano un ritardo di assenza di comunicazione pari a 0,8 secondi che l’astronauta siciliano, durante l’esecuzione dell’esperimento, ha dovuto tenere in considerazione prima di muovere le sue mosse di “presa e rilascio” delle rocce.

«Immaginate che il robot sia l’avatar di Luca sulla Terra, con capacità di visione e tatto», ha affermato l’ingegnere dell’ESA Kjetil Wormnes e capo della campagna di test Amalog-1.
Due telecamere, una nel palmo della mano e l’altra in un braccio manovrabile, per consentire a Luca e agli scienziati che assistevano in remoto di osservare l’ambiente e ottenere un primo piano sulle rocce da prelevare.
Tutto si è svolto nei tempi previsti, nonostante, per essere certi della riuscita dell’esperimento, le rocce fossero state posizionate in angoli angusti.
Luca seguiva le indicazioni di una squadra di geologi del progetto Pangaea, con sede presso EAC in Germania, simulando una vera e propria esplorazione geologica a distanza.
Quello del 25 novembre scorso è stato l’ultimo di una serie di campagne di test uomo – robot per verificare le capacità umane di gestire ambienti complessi e non strutturati, compresa la capacità di controllare il processo decisionale e la sua interfaccia robotica, previsti dal progetto Meteron– rete di operazioni robotiche end to end multiuso di ESA.
Migliorando l’esperienza dell’operatore possiamo rendere possibili attività di controllo di robot impossibili prima di ora e prepararsi alla campagna di test per il prossimo anno da eseguire all’aperto in un ambiente terrestre simile alla Luna. Secondo Thomas Krueger, ingegnere robotico di ESA a capo dello Human Robot Interaction Laboratory di ESA il successo di questi esperimenti aprirà a nuovi metodi di esplorazione dello spazio.